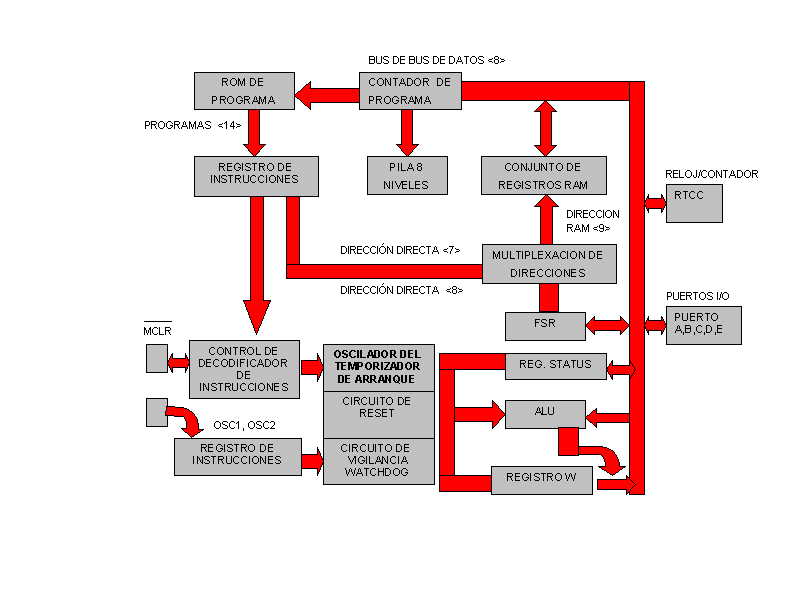
OSCI. La entrada de reloj en el pin OSCI se divide internamente por cuatro para generar cuatro señales de reloj no superpuestas, necesarias para controlar las operaciones de búsqueda, de codificación y ejecución de las instrucciones del programa.
Memoria de programas. Se puede direccionar hasta 4k palabras de 14 bits de la memoria ROM, dispuesta en dos bancos, que almacenan los programas. Para programas más largos se deben utilizar dispositivos con mayor memoria; esta se puede direccionar seleccionando 1 de 2 paginas de 2k palabras cada una. La secuencia de las instrucciones está controlada por el registro contador de programa (PC). El cual se incrementa, al ejecutar una instrucción, para ejecutar el programa grabado en la ROM. Las palabras de la memoria de programa pasan al registro de instrucciones, el cual las comunica al decodificador de instrucciones para que, a su vez, inicie la ejecución de la instrucción. El programa puede soportar direccionamientos en modo directo, indirecto y relativo. El contador de programa (PC) está conectado también a dos registros de stack o pila que permiten soportar ocho niveles consecutivos de llamada a una subrutina.
Bus de datos. Este bus de 8 bits es una vía central que intercomunica los siguientes elementos: el conjunto de registros de la memoria RAM. Los puertos de entrada / salida (I/O), el registro de estado (STATUS), la unidad lógica - aritmética (ALU), el registro de selección FSR (que permite direccionamiento indirecto), los registros de preescalamiento de los temporizadores (TMR0, TMR1, TMR2) y el registro de trabajo (W).
Organización de los registros. Los registros especiales y las posiciones de memoria, están organizadas en un conjunto o arreglo general. Hay 192 registros de RAM direccionables directamente en un sistema de dos bancos de memoria con 96 bytes cada uno. El conjunto de registros está dividido en dos grupos funcionales: los registros operacionales y los de propósito general. Los primeros incluyen el registro contador de reloj (RTCC), el contador de programa (PC), el registro de estados (STATUS), los de entrada/salida (I/O) y el registro de selección (FSR). El direccionamiento directo está soportado mediante instrucciones especiales que cargan los datos de la memoria RAM y en el registro de trabajo W o viceversa. Los datos pueden direccionarse de manera indirecta por medio del registro selector FSR (no hay necesidad de definir el banco de memoria, el FSR “alcanza “ ambos bancos) y están disponibles para el usuario.
Unidad aritmética y lógica (ALU). La Unidad aritmética y lógica de 8 bits contiene un solo registro temporal de trabajo y las funciones lógicas necesaria para ejecutar operaciones aritméticas, operaciones de álgebra de Boole entre el registro de trabajo y cualquier otro registro.
Registros de entrada y salida. Los puertos de entrada y salida, Puerto A, B, C, D, E pueden escribirse y leerse bajo el control del programa, como cualquier otro registro. Sin embargo las instrucciones de lectura, leen siempre el estado del pin de entrada/salida sin importar como esté definido el pin, situación a tener en cuenta cuando se operan en forma bidireccional. Los registros de control de I/O (A, B, C, D, E) se actualizan con valor de 1 en el respectivo registro TRIS para definir un pin como salida ó 0 para definirlo como entrada.
Opciones de oscilador. Hay cuatro tipos de oscilador en la familia de microcontroladores PIC: el XT, el HS o de alta velocidad y potencia, el LP o de baja velocidad y potencia y el RC o de oscilador excitado por una red de resistencias y condensadores, para aplicaciones que no requieren una alta precisión en tiempos. Los XT, HS y LP requieren un cristal cerámico para establecer la oscilación.
Conjunto de instrucciones. Son todas las órdenes o comandos que el PIC puede interpretar y ejecutar; éstas se clasifican en orientadas al byte, orientadas al bit y operaciones literales y de control. Cada instrucción es una palabra de 14 bits dividida en un código de operación, el cual específica la orden a ejecutar y uno o más operandos sobre los que se actúa.
Para más información vea el apéndice A sobre el PIC16C74.