La energía radiante tiene tres características: matiz o tono, saturación y brillo. Las dos primeras son las que hacen referencia al aspecto cualitativo de la radiación. El tema al que se hará referencia es al brillo o a la Intensidad de luz.
La fotometría es la parte de la física que trata de la medida de la luz en su aspecto cuantitativo considerando dos factores, uno objetivo (el espectro visible) y otro subjetivo (el ojo).
La visión fotópica para iluminaciones normales o fuertes y la escotópica para iluminaciones bajas. Este hecho es debido que a iguales cantidades de flujo luminoso de distintas longitudes de onda, no se produce la misma sensación de brillo, así por ejemplo, para igual flujo radiante se obtiene una mayor sensación de brillo para el amarillo - verde que en los extremos del rojo - violeta.
Todos los cálculos realizados en televisión en color, se hacen sobre la curva de sensibilidad fotópica, a la cual se le denomina curva patrón de luminosidad. Con la ayuda de esta curva, cualquier flujo radiante puede ser evaluado en términos de su capacidad para producir brillo.
Un manantial luminoso es cualquier cuerpo que radia energía, ahora bien, no toda la energía que radia es considerada energía luminosa, que es aquella que percibimos con el sentido de la vista, sino que parte de esa energía se transforma en calor y radiaciones no visibles, así que parte de esa energía emitida por un manantial no es energía visible. Las radiaciones luminosas provienen pues del calentamiento de un determinado material a consecuencia de la cual irradia energía.
La energía luminosa radiada por una fuente en una unidad de tiempo recibe el nombre de Flujo luminoso. Su unidad es el lumen.
¿Qué es un Fotómetro?
Un fotómetro es un instrumento que nos permite medir la Intensidad de luz que hay en una escena. En la actualidad la mayoría de los fotómetros utilizan una célula fotoeléctrica, la variación de la corriente eléctrica a la que da lugar la incidencia de la luz sobre la fotocélula es recogida por un microamperímetro, en cuya escala podemos ver las lecturas pertinentes.
Células Fotoeléctricas:
Son dispositivos electrónicos cuyo principio es basado en el efecto fotoeléctrico. En su forma más simple, se compone de un ánodo y un cátodo recubierto de un material fotosensible. La luz que incide sobre el cátodo libera electrones que son atraídos hacia el ánodo, de carga positiva, originando un flujo de corriente proporcional a la intensidad de la radiación. Las células fotoeléctricas pueden estar vacías o llenas de un gas inerte a baja presión para obtener una mayor sensibilidad. Una variante de la célula fotoeléctrica, el fototubo multiplicador o fotomultiplicador, consiste en una serie de placas metálicas dispuestas de forma que la emisión fotoeléctrica se amplifica mediante una emisión eléctrica secundaria. El fototubo multiplicador es capaz de detectar radiaciones extremadamente débiles, por lo que es una herramienta esencial en el área de la investigación nuclear.
Las células fotoeléctricas se emplean en paneles solares, alarmas antirrobo, semáforos de tráfico, puertas automáticas, detección de calor, alumbrado público, cámaras fotográficas, grabación de sonido, televisión, contadores de centelleos entre muchas otras más.
Existen dos tipos diferentes de células fotoeléctricas:
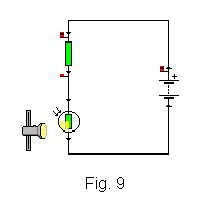
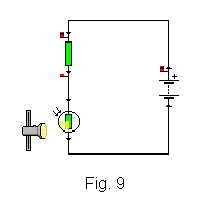
Fotogeneradoras.- En este tipo de célula cuando incide luz sobre ella genera una pequeña corriente eléctrica, que es proporcional a la luz incidente. Los fotómetros que utilizan esta célula no llevan fuentes de voltaje.
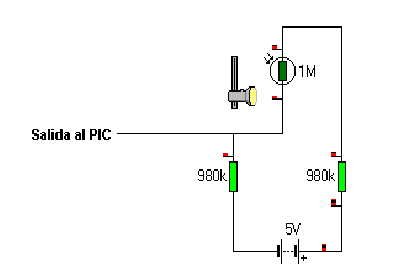
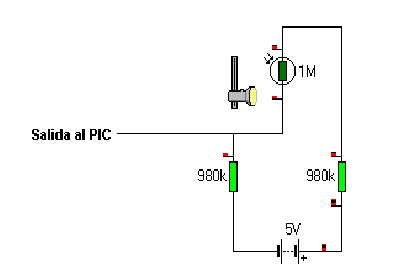
Fotorresistentes.- Cuando la luz incide sobre este tipo de célula, varía su resistencia eléctrica, proporcionalmente a la luz incidente. Es necesaria la utilización de una fuente de voltaje que genere la corriente eléctrica necesaria.
Tipos de Celdas
Selenio (Se): Es una célula fotogeneradora. Tiene respuesta lenta y sensibilidad escasa, por lo que la célula tiene que ser bastante grande. Si el nivel de luz es bajo su exactitud es limitada. Tiene buena respuesta al verde - amarillo y a las radiaciones azules. El ángulo de medición es bastante grande.
Sulfuro de Cadmio (Cds): Es Fotorresistente. Es muy sensible y de respuesta más rápida que la de selenio. Su sensibilidad espectral es uniforme excepto hacia el azul en que es más deficiente. Puede sufrir deslumbramientos que impiden que la célula reaccione en un par de minutos. Su ángulo de medición puede ser muy pequeño.
Silicio(Si): Es parecida a la de cadmio pero tiene una sensibilidad y velocidad de respuesta mayor y una mejor respuesta en los azules. No tiene el inconveniente del deslumbramiento.
Galio–Arsénico–Fósforo: Es del tipo Fotorresistente, es mucho más sensible que las anteriores, consume poca energía y no sufre deslumbramiento.
En el presente proyecto se utilizará Fotoresistencias del tipo Silicio, que son muy comerciales en nuestro medio.