7.1.2 Circuito utilizado en la implementación del sensor de temperatura
El funcionamiento del sensor de temperatura se basa en la corriente que circula a través del circuito básico sugerido para el AD590, el cual es el representado en la figura 4. A medida que aumenta la temperatura aumenta la corriente (que según las especificaciones técnicas aumenta 1uA por grado kelvin) y esta corriente combinada con una resistencia de 1K produce una salida en milivoltios proporcional a la corriente cumpliendo la ley de ohm
V=I x R (2)
El dispositivo para medir temperaturas opera en el rango de –22° C a 100° C.
Un circuito adicional proporciona una adecuación a la entrada del PIC para que este sea capaz de detectar cambios sustanciales y dé medidas correctas.
Esta parte adicional consta de 2 fases:
Fase A:
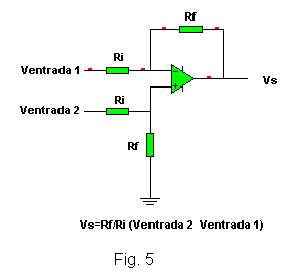
Esta fase se encarga de hacer una resta para lograr dar en milivoltios la temperatura actual. Debido a que se pueden medir temperaturas bajo cero (hasta –22 grados centígrados), un cero representa una temperatura de –22 grados centígrados, un 22 representa cero grados centígrados, un 42 representa veinte grados centígrados, y así sucesivamente, cumpliendo la siguiente formula:
T=A-22 (3)
donde A representa la salida de la señal en la fase A, en la cual el circuito es el siguiente:
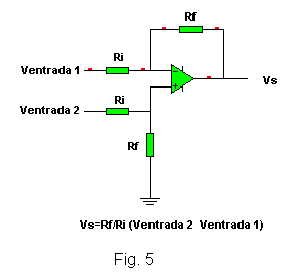
Los cálculos para los valores y la formula que rige los operacionales para implementar la resta son:
Vsalida = Rf/Ri (Ventrada 2 – Ventrada 1) (4)
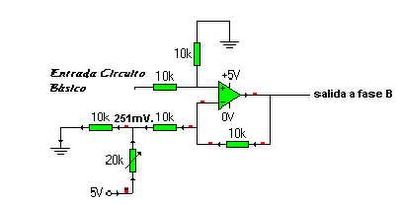
Figura 6
FASE B:
Esta fase pretende aumentar la escala de la salida para que el PIC pueda darse cuenta de los cambios ocurridos; para tal efecto se programa el voltaje de referencia para la conversión A/D (análogo-digital) a 3 Voltios, para obtener un mayor rango de precisión en las conversiones.
Entonces, se tiene que un cambio representativo esta dado por la división del voltaje de referencia y el número máximo de tomas (3 / 255) = 0.01176470588235, (!); lo que quiere decir que cada aumento o disminución de 12 milivoltios, aproximadamente, representa un cambio en la conversión A/D. Con lo anterior se puede aumentar la salida de la fase A de tal forma que el PIC sea más sensible a las variaciones, por ejemplo: a 20 grados centígrados se tendría una lectura de 42 milivoltios, que seria necesario aumentarla a (42*12) 504 milivoltios para que el conversor A/D de cómo resultado 20.
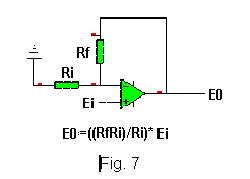
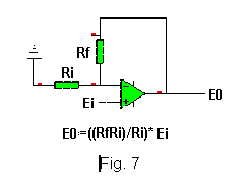
El circuito para esta fase se basa en un seguidor de voltaje cuyo circuito y formula básica es la siguiente:
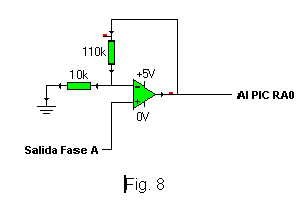
El circuito diseñado es el siguiente (se dan los respectivos valores de las resistencias):
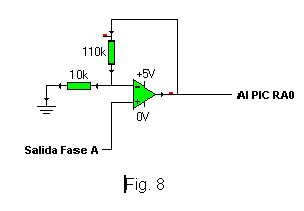
La idea de programación en el PIC comienza seleccionando el puerto o PIN análogo, en este caso el RA0, se da el inicio para la conversión activando el bit GO de ADCON0, se verifica hasta que este bit sea cero(0), lo que quiere decir que haya ocurrido una conversión y luego se traslada el valor del registro ADRES a una variable representativa del proceso, en este caso TEMPERA.
V=I x R (2)
El dispositivo para medir temperaturas opera en el rango de –22° C a 100° C.
Un circuito adicional proporciona una adecuación a la entrada del PIC para que este sea capaz de detectar cambios sustanciales y dé medidas correctas.
Esta parte adicional consta de 2 fases:
Fase A:
Esta fase se encarga de hacer una resta para lograr dar en milivoltios la temperatura actual. Debido a que se pueden medir temperaturas bajo cero (hasta –22 grados centígrados), un cero representa una temperatura de –22 grados centígrados, un 22 representa cero grados centígrados, un 42 representa veinte grados centígrados, y así sucesivamente, cumpliendo la siguiente formula:
T=A-22 (3)
donde A representa la salida de la señal en la fase A, en la cual el circuito es el siguiente:
Los cálculos para los valores y la formula que rige los operacionales para implementar la resta son:
Vsalida = Rf/Ri (Ventrada 2 – Ventrada 1) (4)
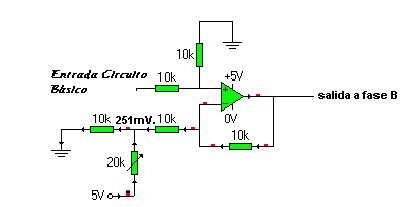
Figura 6
FASE B:
Esta fase pretende aumentar la escala de la salida para que el PIC pueda darse cuenta de los cambios ocurridos; para tal efecto se programa el voltaje de referencia para la conversión A/D (análogo-digital) a 3 Voltios, para obtener un mayor rango de precisión en las conversiones.
Entonces, se tiene que un cambio representativo esta dado por la división del voltaje de referencia y el número máximo de tomas (3 / 255) = 0.01176470588235, (!); lo que quiere decir que cada aumento o disminución de 12 milivoltios, aproximadamente, representa un cambio en la conversión A/D. Con lo anterior se puede aumentar la salida de la fase A de tal forma que el PIC sea más sensible a las variaciones, por ejemplo: a 20 grados centígrados se tendría una lectura de 42 milivoltios, que seria necesario aumentarla a (42*12) 504 milivoltios para que el conversor A/D de cómo resultado 20.
El circuito para esta fase se basa en un seguidor de voltaje cuyo circuito y formula básica es la siguiente:
El circuito diseñado es el siguiente (se dan los respectivos valores de las resistencias):
La idea de programación en el PIC comienza seleccionando el puerto o PIN análogo, en este caso el RA0, se da el inicio para la conversión activando el bit GO de ADCON0, se verifica hasta que este bit sea cero(0), lo que quiere decir que haya ocurrido una conversión y luego se traslada el valor del registro ADRES a una variable representativa del proceso, en este caso TEMPERA.
posted by Alexis @ 9:40 p. m.
![]()

0 Comments:
Publicar un comentario
<< Home